




قراءة لمدة 1 دقيقة نظام إحداثيات قاعدة الروبوت

 الرياضيات والفلك
الرياضيات والفلك
 تقانة المعلومات
تقانة المعلومات
 علم المواد
علم المواد
 الهندسة الكهربائية
الهندسة الكهربائية
 النقل والبنية التحتية
النقل والبنية التحتية
 صناعة النسيج
صناعة النسيج
 الهندسة المدنية
الهندسة المدنية
 الطاقات المتجددة
الطاقات المتجددة
 المناخ والبيئة وإدارة النفايات الصلبة
المناخ والبيئة وإدارة النفايات الصلبة
 التقنيات التربوية والحاسوبية
التقنيات التربوية والحاسوبية
 علوم التربية
علوم التربية
 علم الاجتماع والإنسان
علم الاجتماع والإنسان
 علم الاقتصاد
علم الاقتصاد
 التجارة والمحاسبة
التجارة والمحاسبة
 علم القانون
علم القانون
 هندسة السيارات
هندسة السيارات
 علم الطَبِيعيات (الفيزياء)
علم الطَبِيعيات (الفيزياء)
 علم الكيمياء
علم الكيمياء
 علم الأرض
علم الأرض
 علم الزلازل
علم الزلازل
 علم الأرصاد الجوية
علم الأرصاد الجوية
 علوم البحار
علوم البحار
 هندسة النفط
هندسة النفط
 علم الأحياء
علم الأحياء
 الصحة وجسم الإنسان
الصحة وجسم الإنسان
 علم الوراثة
علم الوراثة
 علم الصيدلة
علم الصيدلة
 الحرب الكُهَيْرِبِيّة
الحرب الكُهَيْرِبِيّة
 الاستشعار عن بعد
الاستشعار عن بعد
 الطب البيطري
الطب البيطري
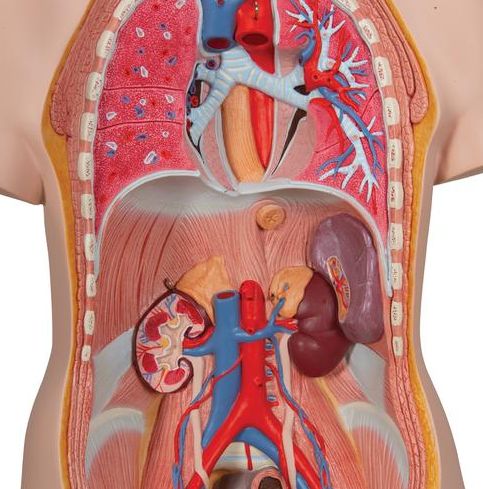 التشريح العياني
التشريح العياني
 البناء والنجارة
البناء والنجارة
 الطباعة والكهرباء
الطباعة والكهرباء
 تقانات الأغذية
تقانات الأغذية
 الإعلام والتواصل
الإعلام والتواصل
 الفلسفة وعلم النفس
الفلسفة وعلم النفس
 الفن، التسلية والرياضة
الفن، التسلية والرياضة
 علوم اللغة والأدب
علوم اللغة والأدب
 الجغرافيا والتاريخ
الجغرافيا والتاريخ
 هندسة المياه
هندسة المياه
 العربية
العربية